



Kontrol Pulse 2 Phase Ditutup Loop Stepper Drive T60Plus


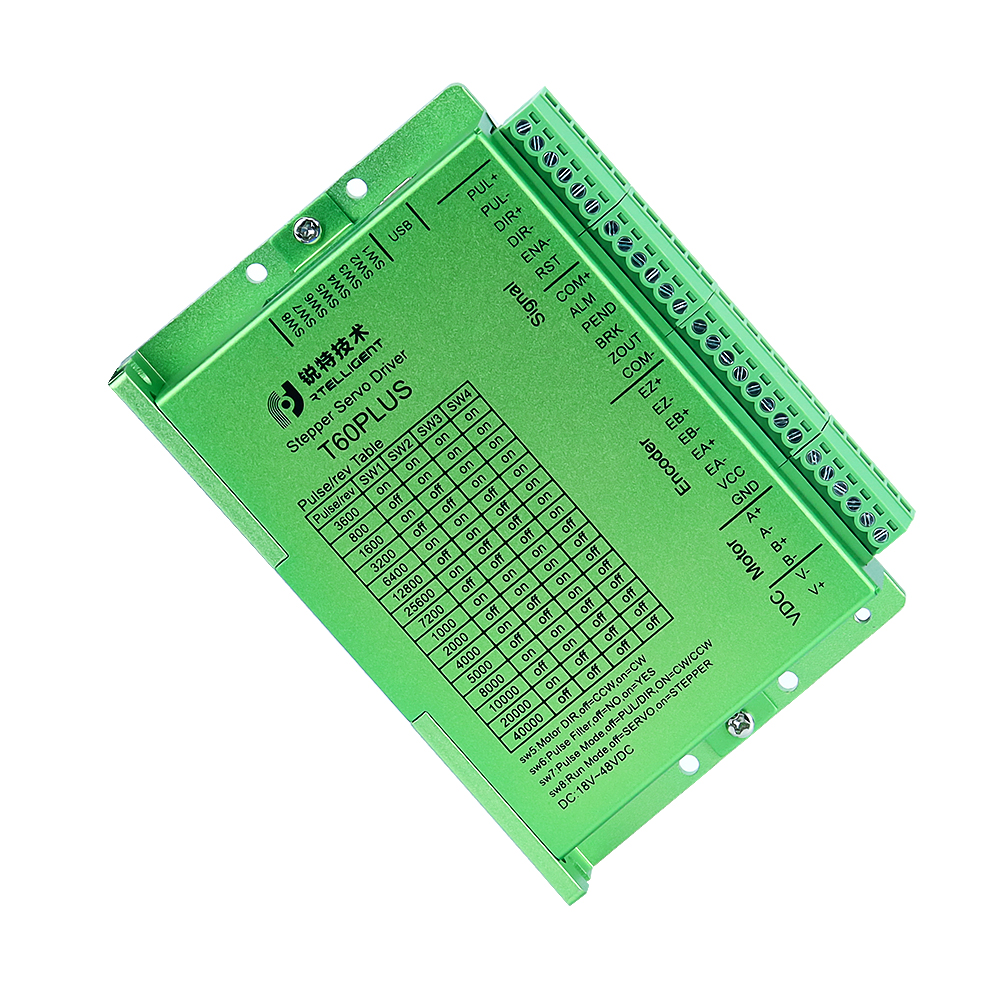
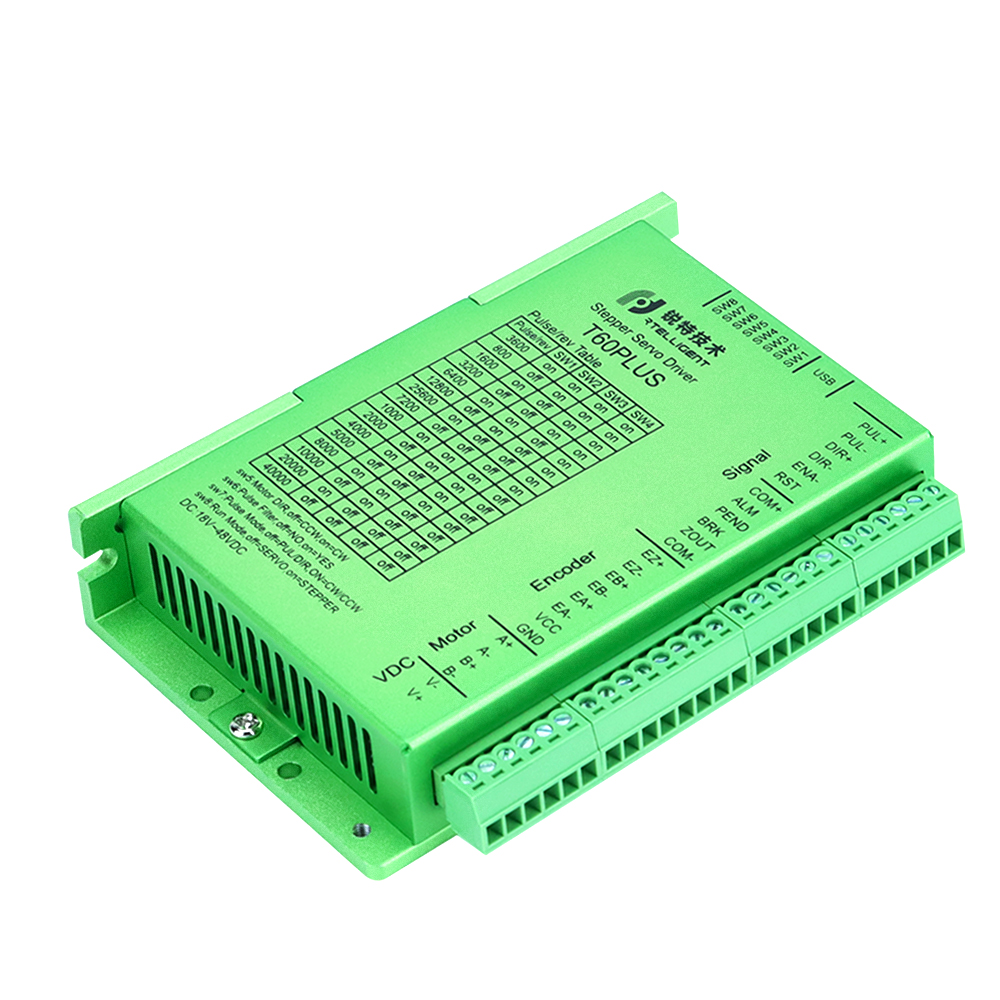
Pambuka produk



Sambungan

Fitur
| sumber daya | 18 ~ 48VDC |
| Kontrol presisi | 4000 Pulse / r |
| Mode pulsa | Arah & pulsa, CW/CCW pulsa ganda, A/B quadrature pulsa |
| Kontrol saiki | Algoritma kontrol vektor servo |
| Setelan subdivisi | Setelan switch DIP, 15 opsi (utawa setelan piranti lunak debugging) |
| Range kacepetan | Konvensional 1200 ~ 1500rpm, nganti 4000rpm |
| Resonansi dipatèni | Pitungan otomatis titik resonansi kanggo nyuda geter frekuensi tengah |
| Pangaturan parameter PID | Piranti lunak debugging kanggo nyetel karakteristik PID motor |
| Filter pulsa | Filter sinyal digital 2MHz |
| Output weker | Output weker kanggo overcurrent, overvoltage, kesalahan posisi, lsp. |
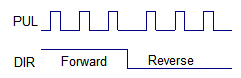
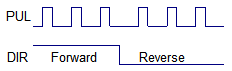
Mode pulsa
Antarmuka sinyal saka drive seri T standar punika pulsa-shaped, lan T60PLUS V3.0 bisa nampa telung jinis sinyal printah pulsa.
| Pulse lan arah (PUL + DIR) |
|
| Pulsa ganda (CW + CCW) |
|
| Nadi ortogonal (A/B nadi ortogonal) | 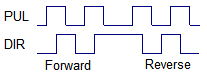 |
Setelan Micro-langkah
| Pulsa / rev | SW1 | SW2 | SW3 | SW4 | pangandikan |
| 3600 | on | on | on | on | Ngalih DIP diuripake menyang "3600" negara lan piranti lunak testing bisa bebas ngganti bagean liyane. |
| 800 | mati | on | on | on | |
| 1600 | on | mati | on | on | |
| 3200 | mati | mati | on | on | |
| 6400 | on | on | mati | on | |
| 12800 | mati | on | mati | on | |
| 25600 | on | mati | mati | on | |
| 7200 | mati | mati | mati | on | |
| 1000 | on | on | on | mati | |
| 2000 | mati | on | on | mati | |
| 4000 | on | mati | on | mati | |
| 5000 | mati | mati | on | mati | |
| 8000 | on | on | mati | mati | |
| 10000 | mati | on | mati | mati | |
| 20000 | on | mati | mati | mati | |
| 40000 | mati | mati | mati | mati |
Setelan Micro-langkah
Terminal drive burned metu?
1. Yen wis short circuit antarane terminal, priksa manawa motor nduwurke tumpukan iku short-circuit.
2. Yen resistance internal antarane terminal gedhe banget, mangga dipriksa.
3. Yen soldering gedhe banget ditambahake kanggo sambungan antarane kabel kanggo mbentuk werni solder.
Drive stepper loop tertutup duwe weker?
1. Yen ana kesalahan sambungan kanggo wiring encoder, priksa manawa nggunakake kabel extension encoder bener, utawa hubungi Rtelligent yen sampeyan ora bisa nggunakake kabel extension kanggo alasan liyane.
2. Priksa manawa encoder rusak kayata output sinyal.
-
 Rtelligent T60PLUS V3.0 User Manual
Rtelligent T60PLUS V3.0 User Manual




